

官方公众号企业安全新浪微博

FreeBuf.COM网络安全行业门户,每日发布专业的安全资讯、技术剖析。

FreeBuf+小程序

- 关注
随着近年来国内机器人领域的不断升温,机器人智能化逐渐进入人们的视野,其中,不少厂家都在使用Robot Operation System(机器人操作系统,以下简称ROS)。但是,因ROS诞生于实验室相对封闭的环境,因此一开始对于安全性的研究并未受到开发者的重视,导致ROS存在着诸多安全上的问题,随着开源和ROS的大热,很多安全问题也随之暴露出来,成为安全从业者研究的热门方向。
《探秘ROS安全系列》是京东安全自主研究和编写的系列文章,此系列将从ROS简介&背景、ROS安全方案&研究趋势、ROS安全方案注解、京东ROS安全研究实践4个部分,详细介绍京东安全对于ROS安全的研究和实践,希望能够与大家一同探讨。
本期是整个系列的第二期,将从ROS安全方案、安全研究趋势两个模块的内容出发,供大家了解现有的ROS安全研究情况,以下,enjoy~
(全文2133字,阅读时间约7分钟)
一、ROS安全方案
1、ROS 1.0 安全方案
在第一期中,我们介绍了关于ROS安全的研究阶段,其中,在第二阶段,ROS 1.0的安全风险充分暴露,业界涌现了众多安全方案,主要解决身份认证、加密通信、访问控制等风险。在各方案中,SROS安全特性相对全面,同时具备较好的易用性(部署工具/脚本),是ROS社区推荐方案。
方案1:ROSAuth
特点:
【目的】解决远程客户端访问ROS身份认证问题。
【实现】ROS系统运行在隔离网络域内;远程客户端在通过SSL在外部Authenticator进行身份鉴权并获取token;远程客户端使用token,通过SSL访问ROS;ROS校验token,允许或拒绝访问。
【不足】未解决身份认证后的Authorization问题。
ROSAuth
https://web.cs.wpi.edu/~cshue/research/tepra14.pdf
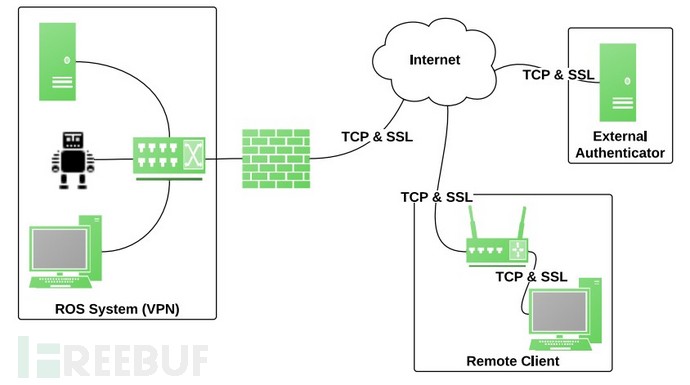
(图片选自上述链接论文)
方案2:ROSRV
特点:
【目的】实现ROS通信实时监控管理。
【实现】ROS Runtime Verification使用Man-in-the-Middle技术,通过增加RVMaster节点,实时监控ROS 1.0内部消息,同时可配置访问控制策略进行访问控制。
【不足】访问控制基于IP,RVMaster中心化设计在节点数过多时的scalability问题。
ROSRV
https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.1063.8693&rep=rep1&type=pdf
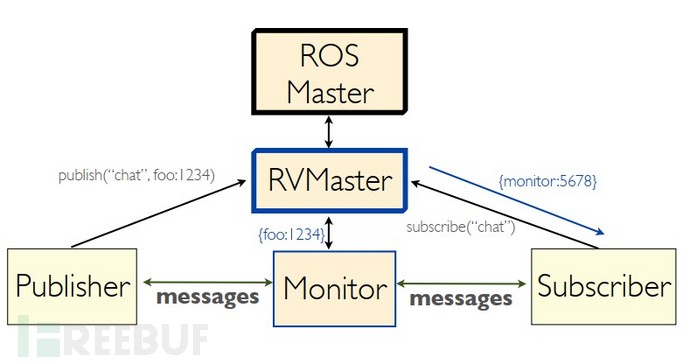
(图片选自论文《2014 ROSRV: Runtime verification for robotics》)
方案3:Secure ROS transport
特点:
【目的】解决ROS通信安全与访问控制
【方案1】应用层方案,使用外部Authentication Server实现publisher-subscriber之间的身份认证与加密通信。优点是无需改动ROS,缺点是应用层实现,无法阻止类似DoS攻击。
(参考链接:https://mediatum.ub.tum.de/doc/1343172/1343172.pdf)
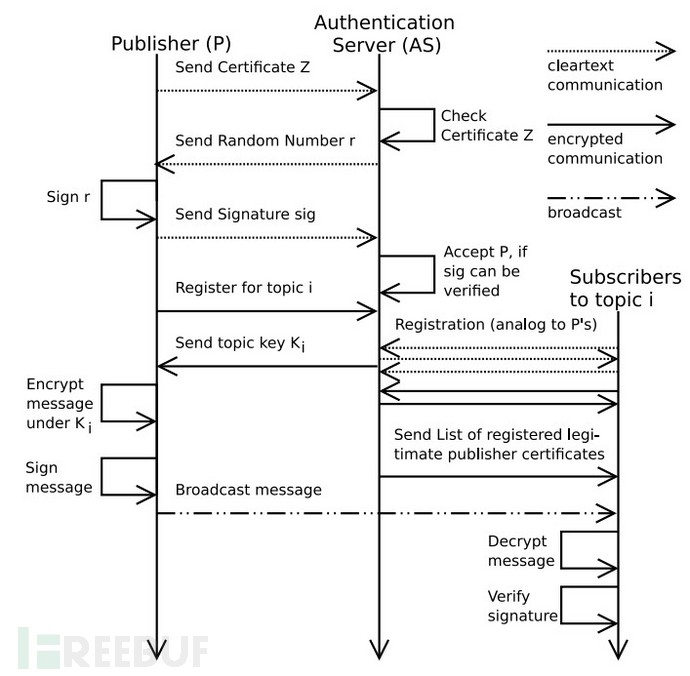 (图片选自上述链接论文)
(图片选自上述链接论文)
【方案2】通信层方案,使用证书+TLS解决节点间身份认证、加密通信、访问控制问题。缺点是没有解决master节点安全问题。
(参考链接:https://www.researchgate.net/publication/314082519_Secure_Communication_for_the_Robot_Operating_System)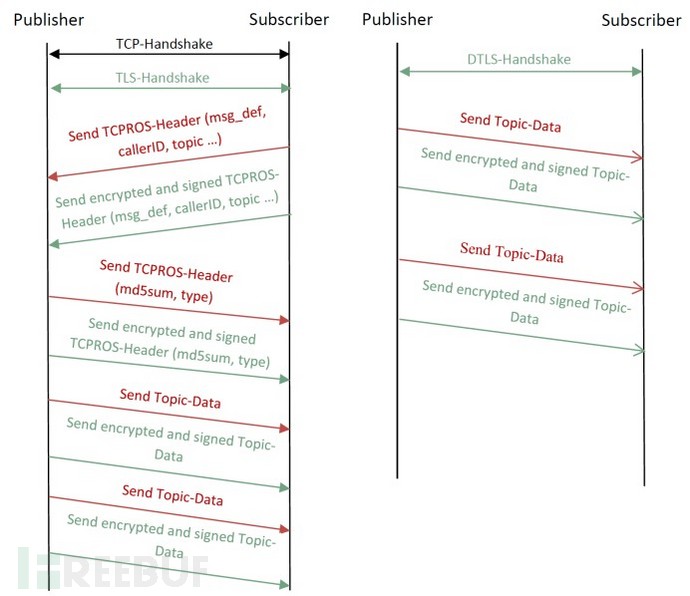 (图片选自上述链接论文)
(图片选自上述链接论文)
方案4:Secure ROS
特点:
【目的】解决ROS通信安全与访问控制。
【方案】基于IPSec实现身份认证与加密通信,使用系统配置文件实现集中式访问控制。优点是安装方便,不足是访问控制等基于IP粒度。
Secure ROS
https://roscon.ros.org/2017/presentations/ROSCon%202017%20SecureROS.pdf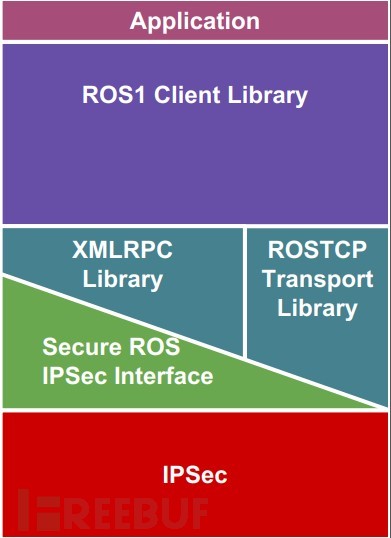
(图片选自2019年 IROS SROS2 Tutorial workshop 的讨论PPT)
方案5:SROS
特点:
【目的】解决ROS通信安全与访问控制。
【方案】基于TLS+证书机制解决身份认证、加密通信、访问控制问题。使用经过证书签名的配置文件进行集中式访问控制,细粒度。不足是需要源码安装及相关配置。
SROS
https://roscon.ros.org/2016/presentations/sros.pdf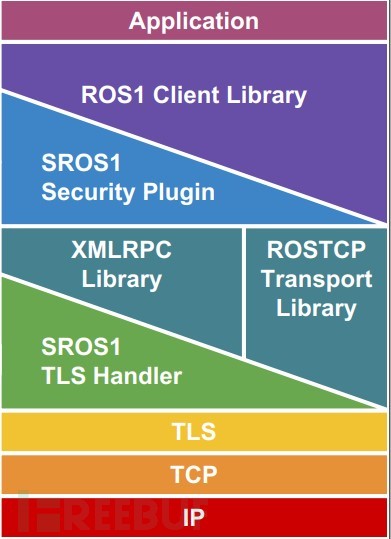
(图片选自2019年 IROS SROS2 Tutorial workshop 的讨论PPT)
2、ROS 2.0 安全方案
ROS 2.0阶段,因组件DDS自带安全特性原因,安全方案有了统一框架,并形成SROS 2。命名SROS 2是为继承和区分SROS方案,但不同于SROS,SROS2是ROS 2官方标准并集成在主线中。
SROS 2
https://ruffsl.github.io/IROS2018_SROS2_Tutorial/
ROS 2.0中,DDS-Security默认未使能。SROS 2方案则是在ROS 2.0基础上,使能DDS-Security,并提供对应部署应用的工具集。可以认为:
SROS 2=ROS 2.0+DDS-Security+Tools
具体可以参考
https://ubuntu.com/blog/what-is-sros-2
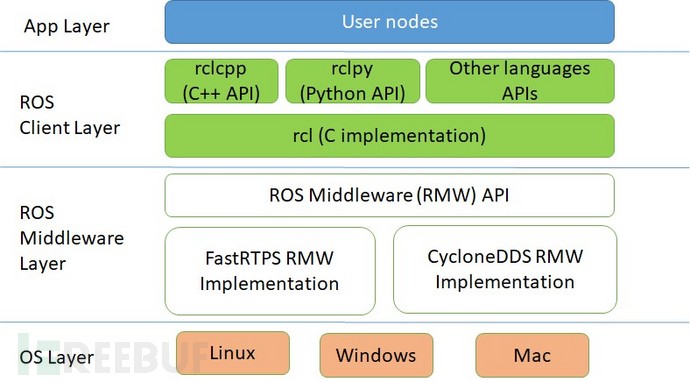
ROS 2适配修改主要有两个,一个是RCL(ROS Client Library)层修改,一个是SROS 2 utilities工具集。
RCL修改主要是安全特性开关和策略配置,具体如ROS_SECURITY_ENABLE (true/false)、ROS_SECURITY_STRATEGY (Enforce/Permissive)、 ROS_SECURITY_KEYSTORE (key files directory) 等参数实现和支持。
SROS 2 utilities工具主要解决PKI秘钥证书和控制策略文件的管理,具体如 CA和KEYSTORE根目录管理、节点公私钥和证书创建部署、访问控制策略文件(Governance/Permission)创建部署等。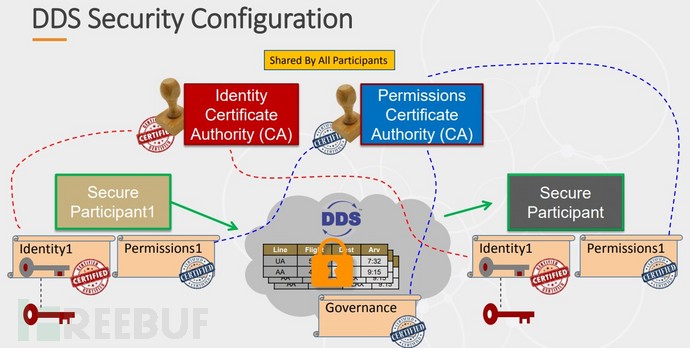
(图片选自2019年 IROS SROS2 Tutorial workshop 的讨论PPT)
 (图片选自《ROS 2 Foxy Fitzroy: Setting a new standard for production robot development》)
(图片选自《ROS 2 Foxy Fitzroy: Setting a new standard for production robot development》)
如上图所示,SROS 2通过PKI机制,解决节点间通信安全,包括身份认证、加密通信;通过策略配置文件(Governance、Permission,证书签名),实现集中式访问控制。
关于访问控制,首先,Governance文件限制domain域的整体访问控制策略,如节点访问控制(是否允许未授权节点访问,是否允许被发现),以及domain内部topic访问控制(是否允许被发现、是否允许未授权读写)等。其次,每个节点的Permission限制自己的访问权限,如是否允许对某topic读写。
因DDS是标准规范且有开源、商业不同实现,ROS 2增加了DDS 抽象适配层RMW,如上图所示。
二、机器人安全趋势
ROS是目前最主流的机器人操作系统框架,ROS安全经过多年研究和发展,在风险分析和安全方案维度已有不小进步,ROS 2中已有了基于DDS的统一安全框架。但是对于ROS甚至整个机器人系统来说,在安全标准与规范、DDS标准与实现差异、DDS安全与性能、全系统方案等维度,还有很多工作可以改进。
1、安全标准
自动驾驶领域已经有相对完整、成熟的安全标准,包括功能安全(Functional Safety)标准ISO 26262、网络安全(Cyber Security)标准ISO 21434。但在机器人领域,现有工业机器人标准ISO 10218、ISO 20218、ISO/TS 15066、服务机器人标准ISO 13482、ISO 23482等主要面向功能安全,尚无权威的网络安全标准。但是,随着服务机器人应用推广、机器人网络安全研究、及产业联盟的推动,机器人网络安全标准是必然趋势。
2、安全方案
在安全方案维度,针对现有方案的问题或盲点,后续可见的研究趋势有:
一是DDS本身的成熟度演进。一方面,当前开源或商业DDS实现与DDS标准规范还存在差异,例如DDS-Security标准规定了5大安全特性(Authentication、Access Control、Cryptographic、Logging、Data Tagging),而多数方案仅实现前3种强制特性;另一方面,开源DDS实现目前还存在性能、稳定性问题,质量成熟度不高。
二是基于DDS-Security安全方案的性能调优。一方面,在安全研究第三阶段,已有很多论文对DDS-Security方案的性能进行过深入分析,如加密算法对通信性能影响、DDS-Security使能及Governance配置对整体性能影响等,但仍缺乏相对全面、精细的性能调优实践、指导。而ROS系统中不同节点、不同消息的安全需求并不完全一致,面向性能优化的安全策略对方案实施有积极意义。另一方面,社区中DDS-Security使能对应的demo样例相对简单、对应安全文档匮乏,用户学习和配置困难,不利于方案推广。
三是安全研究从ROS框架扩展到机器人全系统。在SROS/SROS2聚焦解决ROS本身安全问题后,作为ROS执行环境、存储载体的Host OS的安全和风险受到更多关注。例如SROS 2中秘钥证书默认明文存储在Host OS指定目录下,无额外安全措施。业界libddssec方案通过TEE技术(ARM Trustzone)解决秘钥证书安全存储问题,为机器人系统提供了可信计算和可信根能力,提升系统整体安全性。除软硬件安全能力应用外,一些研究倾向借用传统安全方案如IDS(Intrusion Detection System)部署缓解Host风险,一些研究倾向于在机器人全系统中实施零信任方案,如Zero Trust in Robotics。
Zero Trust in Robotics
https://news.aliasrobotics.com/zero-trust-architecture-robotics/
本期对于ROS的安全方案和趋势介绍就到这里,如有兴趣大家可留言探讨,在下期当中,京东安全将对基于DDS协议的SROS 2方案详情以及实践经验同大家进行分享,感谢关注!
(本文原创自京东安全,转载请注明出处)
- 0 文章数
- 0 关注者